
Digit Locomotion
At Agility Robotics my work covers many aspects and methods of locomotion.
One very visible project I lead is the deployment of the first learned locomtion policy to a robot performing paid labor. This specifically is a learned step recovery policy which is described briefly in this agility blog post.
I worked together with Jonah Siekmann on training the first policy before taking over the training process myself. I then worked through the realtime C++ integration of the policy into the behavior, planning, and control stack. To make a convincing argument about the utility I build comprehensive simulation benchmarking tools and performed a large amount of hardware testing myself.
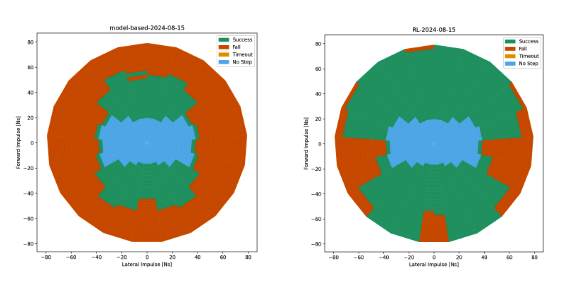
The above chart is somewhat low resolution, but it represents the robot’s ability to withstand an impulse with a magnitude and direction. The color represents the result. Blue is the robot doesn’t step. Green is the robot takes a step but successfully recovers. Orange is the robot falls. The left plot is the baseline model based controller. The right plot was the developed RL controller. It still struggled with pure sideways pushes due to some details about orientation which should be able to be worked around.
This work cumulated in it as a default feature in our internal released software. It prevented quite a few falls at the 2025 promat tradeshow demo. The robustness of these policies are showed off in the video below.
Less visibly, I worked with one other software engineer to fully replace our model-based locomotion planner. This was a challenging project in system design, work allocation, and high performance requirements. The new system was a significant deviation, changing trajectory optimization tooling, dynamic model, objectives and constraints. We built it to the point were it was equal or better in all scenarios then switched over all digits to use the new system. Unfortunately, I can’t go into too much more detail but I am very proud of the work.