Blind Stair Traversal via Reinforcement Learning
Research Project lead by Jonah Siekmann to train reactive control policies to scale staircases without perception.

Research Project lead by Jonah Siekmann to train reactive control policies to scale staircases without perception.
Research project that aims to use a learned controller to follow gaits from a spring loaded inverted pendulum model 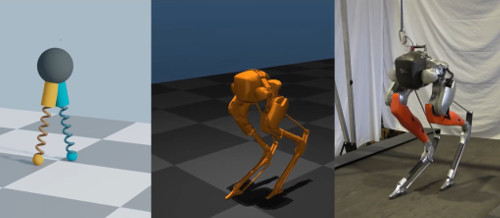
Project to design an active assist and recovery system for a planar bipedal robot. 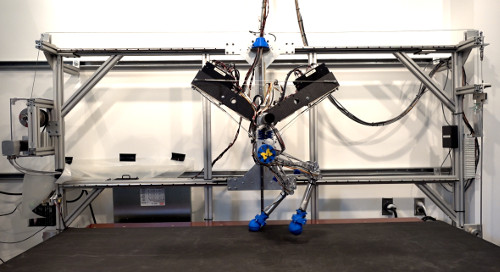
Project at Michigan during undergrad that created contraction sensing air muscles by measuring inductance of the fibers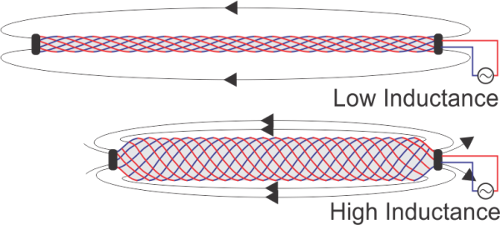
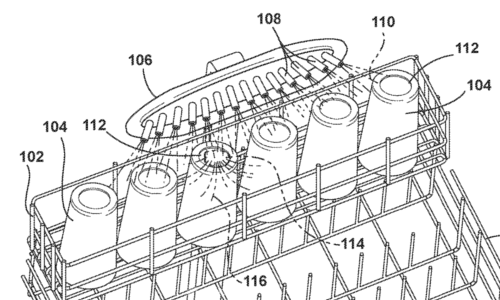
Project at Whirlpool aiming at eliminating puddling of water on items in the top rack of dishwashers.