
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
About me
About me
Posts
Future Blog Post
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
personal_projects
Miscellaneous Woodworking Projects
A collection of smaller projects.
Mission Window Seat
My first serious furniture attempt following a design originally published by Popular Mechanics in 1909.
MCM Console Table
An experiment in mid-century modern design and alternative joinery.
Photography
A set of some of my better photos as I learn photography.
Mission Coffee Table
A coffee table I designed and built in the mission style using traditional joinery.
professional_projects
Extreme Dry
Project at Whirlpool aiming at eliminating puddling of water on items in the top rack of dishwashers.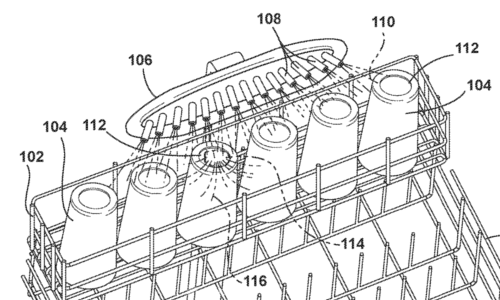
3D Printing Surgical Reference Models
Aided otolaryngology surgeons with a difficult tumor removal by producing accurate models of the patient’s tumor and skull 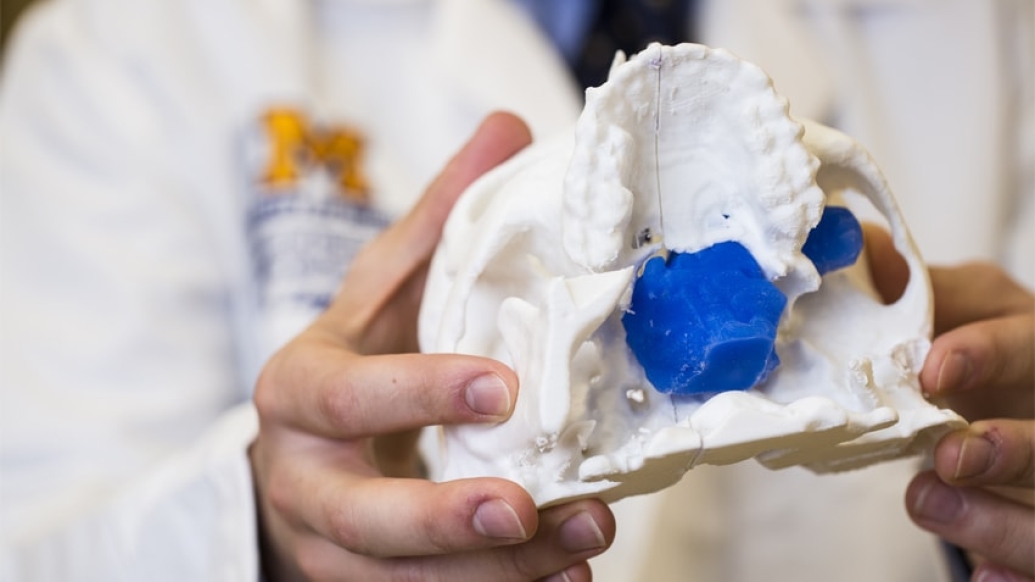
Smart Braids
Project at Michigan during undergrad that created contraction sensing air muscles by measuring inductance of the fibers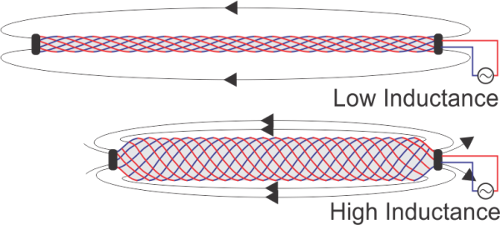
A Legged Robot Recovery System
Project to design an active assist and recovery system for a planar bipedal robot. 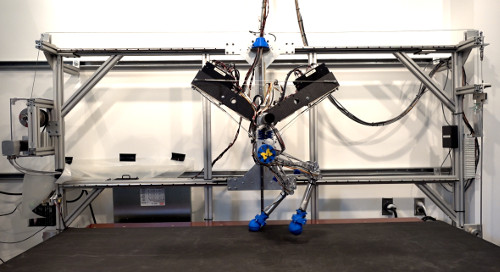
Learning Spring Mass Locomotion
Research project that aims to use a learned controller to follow gaits from a spring loaded inverted pendulum model 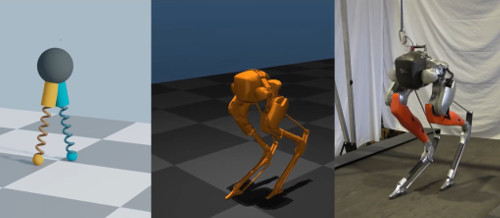
Blind Stair Traversal via Reinforcement Learning
Research Project to train reactive control policies to scale staircases without perception.
Cassie 100m Dash
As a research lab, we set the Guinness World Record for the fastest 100 meter dash by a Bipedal Robot 
Digit Locomotion
Pushed forward the performance and reliability of Digit’s locomotion. 
publications
Paper Title Number 1
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Paper Title Number 2
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2). http://academicpages.github.io/files/paper2.pdf
Paper Title Number 3
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3). http://academicpages.github.io/files/paper3.pdf
Design and control of a recovery system for legged robots
Published in 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), 2016
Recommended citation: Kevin Green, Nils Smit-Anseeuw, Rodney Gleason, C. David Remy, "Design and control of a recovery system for legged robots." 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), 2016. https://ieeexplore.ieee.org/document/7576893
- Computer-aided Design And 3d Printing To Produce A Model For Simulation Of Cleft Lip Repair
Published in The Cleft Palate-craniofacial Journal, 2017
Recommended citation: Ahmed S Ali, David Zopf, Kevin Green, Glenn Green, Chelsea Reighard, "71. Computer-aided Design And 3d Printing To Produce A Model For Simulation Of Cleft Lip Repair." The Cleft Palate-craniofacial Journal, 2017.
Development and Multidisciplinary Preliminary Validation of a 3-Dimensional-Printed Pediatric Airway Model for Emergency Airway Front-of-Neck Access Procedures.
Published in Anesthesia and analgesia, 2018
Recommended citation: Kevin J Kovatch, Allison R Powell, Kevin Green, Chelsea L Reighard, Glenn E Green, Virginia T Gauger, Deborah M Rooney, David A Zopf, "Development and Multidisciplinary Preliminary Validation of a 3-Dimensional-Printed Pediatric Airway Model for Emergency Airway Front-of-Neck Access Procedures.." Anesthesia and analgesia, 2018.
Development of a 3-Dimensional Practice Nasolaryngoscopy Model
Published in Journal of Allergy and Clinical Immunology, 2018
Recommended citation: Vivian C. Nanagas, Keerthi R. Karamched, Allison Powell, Kevin Green, Alan P. Baptist, Glenn E. Green, "Development of a 3-Dimensional Practice Nasolaryngoscopy Model." Journal of Allergy and Clinical Immunology, 2018. https://pubmed.ncbi.nlm.nih.gov/30234534/
Footstep Planning and Operational Space Control on Cassie
Published in Dynamic Walking Meeting, 2018
Oral Presentation
Recommended citation: Kevin Green, Taylor Apgar, Jonathan Hurst, "Footstep Planning and Operational Space Control on Cassie." Dynamic Walking Meeting, 2018.
Method of using high velocity water to remove puddling in a dishwasher
Published in 9895043, 2018
Recommended citation: Alvaro Vallejo Noriega, Harsh R. Mondkar, Kevin Green, "Method of using high velocity water to remove puddling in a dishwasher." 9895043, 2018. https://patents.google.com/patent/US9895043B2
Ear splint to correct congenital ear deformities
Published in WO2018053219A1, 2018
Recommended citation: David Zopf, Kevin Green, Kyle Vankoevering, "Ear splint to correct congenital ear deformities." WO2018053219A1, 2018. https://patents.google.com/patent/WO2018053219A1
Fast Online Trajectory Optimization for the Bipedal Robot Cassie
Published in Robotics: Science and Systems, 2018
Recommended citation: Taylor Apgar, Patrick Clary, Kevin Green, Alan Fern, Jonathan Hurst, "Fast Online Trajectory Optimization for the Bipedal Robot Cassie." Robotics: Science and Systems, 2018. http://www.roboticsproceedings.org/rss14/p54.pdf
Method of using high velocity water to remove puddling in a dishwasher
Published in 9986883, 2018
Recommended citation: Alvaro Vallejo Noriega, Harsh R. Mondkar, Kevin Green, "Method of using high velocity water to remove puddling in a dishwasher." 9986883, 2018. https://patents.google.com/patent/US9986883B2
DISHWASHER WITH HIGH-VELOCITY SPRAYER
Published in 20180249881, 2018
Recommended citation: Alvaro Vallejo Noriega, Harsh R. Mondkar, Kevin Green, "DISHWASHER WITH HIGH-VELOCITY SPRAYER." 20180249881, 2018. https://patents.google.com/patent/US20180249881A1
Development of a Novel, Low-Cost, High-fidelity Cleft Lip Repair Surgical Simulator Using Computer-Aided Design and 3-Dimensional PrintingDevelopment of a Cleft Lip Repair Surgical Simulator Using Computer-Aided Design and 3-D Printing
Published in JAMA Facial Plastic Surgery, 2019
Recommended citation: Chelsea L. Reighard, Kevin Green, Deborah M. Rooney, David A. Zopf, "Development of a Novel, Low-Cost, High-fidelity Cleft Lip Repair Surgical Simulator Using Computer-Aided Design and 3-Dimensional PrintingDevelopment of a Cleft Lip Repair Surgical Simulator Using Computer-Aided Design and 3-D Printing." JAMA Facial Plastic Surgery, 2019. https://doi.org/10.1001/jamafacial.2018.1237
Development of a high fidelity subglottic stenosis simulator for laryngotracheal reconstruction rehearsal using 3D printing
Published in International Journal of Pediatric Otorhinolaryngology, 2019
Recommended citation: Chelsea L. Reighard, Kevin Green, Allison R. Powell, Deborah M. Rooney, David A. Zopf, "Development of a high fidelity subglottic stenosis simulator for laryngotracheal reconstruction rehearsal using 3D printing." International Journal of Pediatric Otorhinolaryngology, 2019. http://www.sciencedirect.com/science/article/pii/S0165587619302484
Control of Compliant Robotic Legs for Modal Behavior
Published in Dynamic Walking Meeting, 2019
Oral Presentation
Recommended citation: Kevin Green, Ross L. Hatton, Jonathan Hurst, "Control of Compliant Robotic Legs for Modal Behavior." Dynamic Walking Meeting, 2019.
The Energetic Benefit of Midstance Ankle Torque in Dynamic Gaits
Published in Dynamic Walking Meeting, 2019
Oral Presentation
Recommended citation: Mike Hector, Kevin Green, Burak Sencer, Jonathan Hurst, "The Energetic Benefit of Midstance Ankle Torque in Dynamic Gaits." Dynamic Walking Meeting, 2019.
Ankle Torque During Mid-Stance Does Not Lower Energy Requirements of Steady Gaits
Published in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019
Recommended citation: Mike Hector, Kevin Green, Burak Sencer, Jonathan Hurst, "Ankle Torque During Mid-Stance Does Not Lower Energy Requirements of Steady Gaits." 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019. https://ieeexplore.ieee.org/document/8968606
Learning to Walk without Dynamics Randomization
Published in RSS 2020: 2nd Workshop on Closing the Reality Gap in Sim2Real Transfer for Robotics, 2020
Recommended citation: Jeremy Dao, Helei Duan, Kevin Green, Jonathan Hurst, Alan Fern, "Learning to Walk without Dynamics Randomization." RSS 2020: 2nd Workshop on Closing the Reality Gap in Sim2Real Transfer for Robotics, 2020. https://sim2real.github.io/assets/papers/2020/dao.pdf
Planning for the Unexpected: Explicitly Optimizing Motions for Ground Uncertainty in Running
Published in 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020
Recommended citation: Kevin Green, Ross L. Hatton, Jonathan Hurst, "Planning for the Unexpected: Explicitly Optimizing Motions for Ground Uncertainty in Running." 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020. https://doi.org/10.1109/ICRA40945.2020.9197049
Series Elastic Actuation
Published in Encyclopedia of Robotics, 2020
Recommended citation: Jonathan Hurst, Kevin Green, "Series Elastic Actuation." Encyclopedia of Robotics, 2020. https://doi.org/10.1007/978-3-642-41610-1_120-1
Learning Bipedal Locomotion in Task Space
Published in Dynamic Walking Meeting, 2020
Recommended citation: Helei Duan, Jeremy Dao, Kevin Green, Alan Fern, Jonathan Hurst, "Learning Bipedal Locomotion in Task Space." Dynamic Walking Meeting, 2020. https://www.seas.upenn.edu/~posa/DynamicWalking2020/682-1014-1-RV.pdf
Leveraging Spring Mass Locomotion to Guide Learned Walking Controllers
Published in Dynamic Walking Meeting, 2020
Recommended citation: Kevin Green, Yesh Godse, Jeremy Dao, Ross L Hatton, Alan Fern, Jonathan Hurst, "Leveraging Spring Mass Locomotion to Guide Learned Walking Controllers." Dynamic Walking Meeting, 2020. https://www.seas.upenn.edu/~posa/DynamicWalking2020/723-1093-1-RV.pdf
Blind Bipedal Stair Traversal via Sim-to-Real Reinforcement Learning
Published in Robotics: Science and Systems, 2021
Recommended citation: Jonah Siekmann, Kevin Green, John Warila, Alan Fern, Jonathan Hurst, "Blind Bipedal Stair Traversal via Sim-to-Real Reinforcement Learning." Robotics: Science and Systems, 2021. https://roboticsconference.org/2021/program/papers/061/index.html
Challenges of Learned High-Speed Locomotion over Five Kilometers in the Real World
Published in ICRA 2021: 5th Workshop on Legged Robots: Towards Real-World Deployment of Legged Robots, Winner Best Extended Abstract, 2021
Recommended citation: Jeremy Dao, Kevin Green, Helei Duan, Jonah Siekmann, Yesh Godse, Alan Fern, Jonathan Hurst, "Challenges of Learned High-Speed Locomotion over Five Kilometers in the Real World." ICRA 2021: 5th Workshop on Legged Robots: Towards Real-World Deployment of Legged Robots, Winner Best Extended Abstract, 2021. https://drive.google.com/file/d/1zOS-7Og81mWiXLqMs6el0_Vp8lyWwG0q/view
Learning Spring Mass Locomotion: Guiding Policies with a Reduced-Order Model
Published in IEEE Robotics and Automation Letters, 2021
Recommended citation: Kevin Green, Yesh Godse, Jeremy Dao, Ross L. Hatton, Alan Fern, Jonathan Hurst, "Learning Spring Mass Locomotion: Guiding Policies with a Reduced-Order Model." IEEE Robotics and Automation Letters, 2021. https://doi.org/10.1109/LRA.2021.3066833
Learning Task Space Actions for Bipedal Locomotion
Published in 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021
Recommended citation: Helei Duan, Jeremy Dao, Kevin Green, Taylor Apgar, Alan Fern, Jonathan Hurst, "Learning Task Space Actions for Bipedal Locomotion." 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021.
Pushing the Limits: Running at 3.2m/s on Cassie
Published in Dynamic Walking Meeting, 2021
Recommended citation: Jeremy Dao, Helei Duan, Kevin Green, Jonah Siekmann, Yesh Godse, Jonathan Hurst, Alan Fern, "Pushing the Limits: Running at 3.2m/s on Cassie." Dynamic Walking Meeting, 2021.
Hey Everyone, We have Solved Bipedal Locomotion* (certain terms and conditions may apply)
Published in Dynamic Walking Meeting, 2021
Recommended citation: Yesh Godse, Jonah Siekmann, Helei Duan, Jeremy Dao, Kevin Green, Jonathan Hurst, Alan Fern, "Hey Everyone, We have Solved Bipedal Locomotion* (certain terms and conditions may apply)." Dynamic Walking Meeting, 2021.
Observations from Blind Stair Traversal on Cassie
Published in Dynamic Walking Meeting, 2021
Recommended citation: Kevin Green, Jonah Siekmann, Helei Duan, Yesh Godse, Jeremy Dao, Alan Fern, Jonathan Hurst, "Observations from Blind Stair Traversal on Cassie." Dynamic Walking Meeting, 2021.
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
Published in 2022 IEEE International Conference on Robotics and Automation (ICRA), 2022
Recommended citation: Jeremy Dao, Kevin Green, Helei Duan, Alan Fern, Jonathan Hurst, "Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads." 2022 IEEE International Conference on Robotics and Automation (ICRA), 2022.
Sim-to-Real Learning of Footstep-Constrained Bipedal Dynamic Walking
Published in 2022 IEEE International Conference on Robotics and Automation (ICRA), 2022
Recommended citation: Helei Duan, Ashish Malik, Jeremy Dao, Aseem Saxena, Kevin Green, Jonah Siekmann, Alan Fern, Jonathan Hurst, "Sim-to-Real Learning of Footstep-Constrained Bipedal Dynamic Walking." 2022 IEEE International Conference on Robotics and Automation (ICRA), 2022.
Dishwasher with high-velocity sprayer
Published in 11389042, 2022
Recommended citation: Alvaro Vallejo Noriega, Harsh R. Mondkar, Kevin Green, "Dishwasher with high-velocity sprayer." 11389042, 2022. https://patents.google.com/patent/US11389042B2
Agile Bipedal Locomotion via Hierarchical Control by Incorporating Physical Principles, Learning, and Optimization
Published in Oregon State University, 2022
Recommended citation: Kevin Green, "Agile Bipedal Locomotion via Hierarchical Control by Incorporating Physical Principles, Learning, and Optimization." Oregon State University, 2022. https://ir.library.oregonstate.edu/concern/graduate_thesis_or_dissertations/g732dh894
Motion Planning for Agile Legged Locomotion using Failure Margin Constraints
Published in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Recommended citation: Kevin Green, John Warila, Ross L Hatton, Jonathan Hurst, "Motion Planning for Agile Legged Locomotion using Failure Margin Constraints." 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022. https://ieeexplore.ieee.org/document/9981903
Dynamic Bipedal Maneuvers through Sim-to-Real Reinforcement Learning
Published in 2022 IEEE-RAS International Conference on Humanoid Robots, 2022
Recommended citation: Fangzhou Yu, Ryan Batke, Jeremy Dao, Jonathan Hurst, Kevin Green, Alan Fern, "Dynamic Bipedal Maneuvers through Sim-to-Real Reinforcement Learning." 2022 IEEE-RAS International Conference on Humanoid Robots, 2022. https://ieeexplore.ieee.org/document/10000225
Optimizing Bipedal Maneuvers of Single Rigid-Body Models for Reinforcement Learning
Published in 2022 IEEE-RAS International Conference on Humanoid Robots, 2022
Recommended citation: Ryan Batke, Fangzhou Yu, Jeremy Dao, Jonathan Hurst, Ross L Hatton, Alan Fern, Kevin Green, "Optimizing Bipedal Maneuvers of Single Rigid-Body Models for Reinforcement Learning." 2022 IEEE-RAS International Conference on Humanoid Robots, 2022. https://ieeexplore.ieee.org/document/9999741
Optimizing Bipedal Locomotion for The 100m Dash With Comparison to Human Running
Published in 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
Recommended citation: Devin Crowley, Jeremy Dao, Helei Duan, Kevin Green Jonathan Hurst, Alan Fern "Optimizing Bipedal Locomotion for The 100m Dash With Comparison to Human Running" 2023 IEEE International Conference on Robotics and Automation https://ieeexplore.ieee.org/abstract/document/10160436
Paper Title Number 4
Published in GitHub Journal of Bugs, 2024
This paper is about fixing template issue #693.
Recommended citation: Your Name, You. (2024). "Paper Title Number 3." GitHub Journal of Bugs. 1(3). http://academicpages.github.io/files/paper3.pdf
talks
Footstep Planning and Operational Space Control on Cassie
Oral Presentation
Recommended citation: Kevin Green, Taylor Apgar, Jonathan Hurst, "Footstep Planning and Operational Space Control on Cassie." Dynamic Walking Meeting, 2018.
Control of Compliant Robotic Legs for Modal Behavior
Oral Presentation
Recommended citation: Kevin Green, Ross Hatton, Jonathan Hurst, "Control of Compliant Robotic Legs for Modal Behavior." Dynamic Walking Meeting, 2019.
The Energetic Benefit of Midstance Ankle Torque in Dynamic Gaits
Oral Presentation
Recommended citation: Mike Hector, Kevin Green, Burak Sencer, Jonathan Hurst, "The Energetic Benefit of Midstance Ankle Torque in Dynamic Gaits." Dynamic Walking Meeting, 2019.
Learning to Walk without Dynamics Randomization
Recommended citation: Jeremy Dao, Helei Duan, Kevin Green, Jonathan Hurst, Alan Fern, "Learning to Walk without Dynamics Randomization." RSS 2020: 2nd Workshop on Closing the Reality Gap in Sim2Real Transfer for Robotics, 2020. https://sim2real.github.io/assets/papers/2020/dao.pdf
Learning Bipedal Locomotion in Task Space
Recommended citation: Helei Duan, Jeremy Dao, Kevin Green, Alan Fern, Jonathan Hurst, "Learning Bipedal Locomotion in Task Space." Dynamic Walking Meeting, 2020. https://www.seas.upenn.edu/~posa/DynamicWalking2020/682-1014-1-RV.pdf
Leveraging Spring Mass Locomotion to Guide Learned Walking Controllers
Recommended citation: Kevin Green, Yesh Godse, Jeremy Dao, Ross Hatton, Alan Fern, Jonathan Hurst, "Leveraging Spring Mass Locomotion to Guide Learned Walking Controllers." Dynamic Walking Meeting, 2020. https://www.seas.upenn.edu/~posa/DynamicWalking2020/723-1093-1-RV.pdf
Challenges of Learned High-Speed Locomotion over Five Kilometers in the Real World
Recommended citation: Jeremy Dao, Kevin Green, Helei Duan, Jonah Siekmann, Yesh Godse, Alan Fern, Jonathan Hurst, "Challenges of Learned High-Speed Locomotion over Five Kilometers in the Real World." ICRA 2021: 5th Workshop on Legged Robots: Towards Real-World Deployment of Legged Robots, Winner Best Extended Abstract, 2021. https://drive.google.com/file/d/1zOS-7Og81mWiXLqMs6el0_Vp8lyWwG0q/view
Pushing the Limits: Running at 3.2m/s on Cassie
Recommended citation: Jeremy Dao, Helei Duan, Kevin Green, Jonah Siekmann, Yesh Godse, Jonathan Hurst, Alan Fern, "Pushing the Limits: Running at 3.2m/s on Cassie." Dynamic Walking Meeting, 2021.
Hey Everyone, We have Solved Bipedal Locomotion* (certain terms and conditions may apply)
Recommended citation: Yesh Godse, Jonah Siekmann, Helei Duan, Jeremy Dao, Kevin Green, Jonathan Hurst, Alan Fern, "Hey Everyone, We have Solved Bipedal Locomotion* (certain terms and conditions may apply)." Dynamic Walking Meeting, 2021.
Observations from Blind Stair Traversal on Cassie
Recommended citation: Kevin Green, Jonah Siekmann, Helei Duan, Yesh Godse, Jeremy Dao, Alan Fern, Jonathan Hurst, "Observations from Blind Stair Traversal on Cassie." Dynamic Walking Meeting, 2021.
Physics First Reinforcement Learning for Cassie
Recommended citation: Kevin Green "Physics First Reinforcement Learning for Cassie" Episode 3: (Task)Objectives, Dynamic Walking Meeting, 2021.
Perspectives on Reinforcement Learning for Cassie: Hierarchies, Interfaces and Objectives
Recommended citation: Kevin Green "Perspectives on Reinforcement Learning for Cassie: Hierarchies, Interfaces and Objectives" DAIR Lab Seminar Dynamic Walking Meeting, University of Pennsylvania, July 2021.
Embracing Ground Uncertainty in Control of Agile Bipedal Robots
Recommended citation: Kevin Green, Jonathan Hurst, "Embracing Ground Uncertainty in Control of Agile Bipedal Robots." Impact-Aware Robotics Workshop, IROS, 2021
Agile Bipedal Locomotion through Reduced-Order Models and Reinforcement Learning
Recommended citation: Kevin Green "Agile Bipedal Locomotion through Reduced-Order Models and Reinforcement Learning" Mechanical and Industrial Engineering Department Seminar, University of Massachusetts Amherst, Feb 2022.
Challenges in transitioning AI advances from simulators and testbeds to the real-world
Recommended citation: Kevin Green, Ani Kembhavi, Luis Antonio Garcia, Ser Nam Lim, Rob Hyland, Jeff Krichmar "Challenges in transitioning AI advances from simulators and testbeds to the real-world" Sim2Real Panel, AAAI Spring Symposium 2022, March 2022.
How to Train Your Robot (to walk)
Recommended citation: Kevin Green "How to Train Your Robot (to walk)" Monthly meeting invited speaker, Seattle Robotics Society, May 2022.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.